RT-DETR改进策略【注意力机制篇】| CVPR-2023 FSAS 基于频域的自注意力求解器 结合频域计算和卷积操作 降低噪声影响
一、本文介绍
本文记录的是
利用
FSAS
模块优化
RT-DETR
的目标检测网络模型
。
FSAS
全称为:
Frequency domain-based Self-Attention Solver
,其结合了
频域计算
的高效性和
卷积操作
的特性,有效地
降低了注意力计算的复杂度
。在加入到
RT-DETR
网络中,
提升图像特征的表示能力
,特别是在
处理高分辨率图像时能够减少计算成本并降低噪声影响。
二、FSAS介绍
Efficient Frequency Domain-based Transformers for High-Quality Image Deblurring
2.1 出发点
- 降低复杂度 :在视觉Transformer中,计算缩放点积注意力的空间复杂度和时间复杂度较高,分别为 O ( N 2 ) O(N^{2}) O ( N 2 ) 和 O ( N 2 C ) O(N^{2}C) O ( N 2 C ) ,当图像分辨率和提取的补丁数量较大时,计算成本难以承受。虽然可以通过下采样操作或减少补丁数量来缓解,但会导致信息丢失。因此需要一种更高效的方法来估计注意力图,以降低复杂度。
- 利用频域特性 :基于卷积定理,即空间域中两个信号的相关性或卷积等同于频域中它们的逐元素乘积。作者思考能否在频域中通过逐元素乘积操作而不是在空间域中计算矩阵乘法来有效地估计注意力图。
2.2 原理
2.2.1 基于卷积操作的转换
首先注意到缩放点积注意力计算中 Q K ⊤ QK^{\top} Q K ⊤ 的每个元素是通过内积获得的,基于此,如果对 q i q_{i} q i 和所有的 k j k_{j} k j 分别应用重塑函数, Q K ⊤ QK^{\top} Q K ⊤ 的所有第 i i i 列元素可以通过 卷积操作 获得。
2.2.2 频域转换与计算
根据卷积定理,进一步在
频域
中进行计算。通过对估计的特征
F
q
F_{q}
F
q
和
F
k
F_{k}
F
k
应用
快速傅里叶变换(FFT)
,并在
频域
中估计它们的相关性
A
=
F
−
1
(
F
(
F
q
)
F
(
F
k
)
‾
)
A=\mathcal{F}^{-1}\left(\mathcal{F}\left(F_{q}\right) \overline{\mathcal{F}\left(F_{k}\right)}\right)
A
=
F
−
1
(
F
(
F
q
)
F
(
F
k
)
)
其中
F
(
.
)
\mathcal{F}(.)
F
(
.
)
表示
FFT
,
F
−
1
(
⋅
)
\mathcal{F}^{-1}(\cdot)
F
−
1
(
⋅
)
表示
逆FFT
,
F
(
.
)
‾
\overline{\mathcal{F}(.)}
F
(
.
)
表示共轭转置操作。
最后通过
V
a
t
t
=
L
(
A
)
F
v
V_{a t t}=\mathcal{L}(A) F_{v}
V
a
tt
=
L
(
A
)
F
v
估计聚合特征,其中
L
(
⋅
)
\mathcal{L}(\cdot)
L
(
⋅
)
是
层归一化
操作。
2.3结构
如
图(b)
所示,详细网络结构如下:
-
卷积层获取特征
:首先通过
1×1点卷积 和3×3深度卷积 获得 F q F_{q} F q 、 F k F_{k} F k 和 F v F_{v} F v 。 -
频域转换层
:对
F
q
F_{q}
F
q
和
F
k
F_{k}
F
k
应用
FFT进行 频域转换 。 - 相关性计算层 :在频域中计算相关性 A A A 。
- 特征聚合层 :通过 层归一化 和与 F v F_{v} F v 的计算得到 V a t t V_{a t t} V a tt 。
-
输出层
:最后通过
X
a
t
t
=
X
+
C
o
n
v
1
×
1
(
V
a
t
t
)
X_{a t t}=X + Conv_{1×1}(V_{a t t})
X
a
tt
=
X
+
C
o
n
v
1
×
1
(
V
a
tt
)
生成
FSAS的输出特征,其中 C o n v 1 × 1 ( ⋅ ) Conv_{1×1}(\cdot) C o n v 1 × 1 ( ⋅ ) 是1×1像素的卷积。

2.4 优势
-
复杂度降低
-
空间复杂度
:
FSAS的空间复杂度降低到 O ( N ) O(N) O ( N ) ,相比原始缩放点积注意力的 O ( N 2 ) O(N^{2}) O ( N 2 ) 显著降低。 - 时间复杂度 :时间复杂度降低到 O ( N l o g N ) O(N log N) O ( Nl o g N ) ,对于每个特征通道,大大减少了计算量。
-
空间复杂度
:
-
性能提升
-
与空间域方法比较
:在GoPro数据集上的实验表明,与在空间域计算缩放点积注意力的方法(如Swin Transformer)相比,
FSAS能生成更好的去模糊结果。例如,空间域方法的PSNR值比FSAS + DFFN低0.27dB。 -
与仅使用FFN的方法比较
:与仅使用FFN的基线方法相比,使用
FSAS的PSNR值提高了0.42dB,能更好地去除模糊,边界恢复得更好。
-
与空间域方法比较
:在GoPro数据集上的实验表明,与在空间域计算缩放点积注意力的方法(如Swin Transformer)相比,
论文: https://arxiv.org/pdf/2211.12250
源码: https://github.com/kkkls/FFTformer
三、FSAS的实现代码
FSAS
及其改进的实现代码如下:
import torch
import torch.nn as nn
import numbers
from einops import rearrange
from ultralytics.nn.modules.conv import LightConv
def to_3d(x):
return rearrange(x, 'b c h w -> b (h w) c')
def to_4d(x, h, w):
return rearrange(x, 'b (h w) c -> b c h w', h=h, w=w)
class WithBias_LayerNorm(nn.Module):
def __init__(self, normalized_shape):
super(WithBias_LayerNorm, self).__init__()
if isinstance(normalized_shape, numbers.Integral):
normalized_shape = (normalized_shape,)
normalized_shape = torch.Size(normalized_shape)
assert len(normalized_shape) == 1
self.weight = nn.Parameter(torch.ones(normalized_shape))
self.bias = nn.Parameter(torch.zeros(normalized_shape))
self.normalized_shape = normalized_shape
def forward(self, x):
mu = x.mean(-1, keepdim=True)
sigma = x.var(-1, keepdim=True, unbiased=False)
return (x - mu) / torch.sqrt(sigma + 1e-5) * self.weight + self.bias
class BiasFree_LayerNorm(nn.Module):
def __init__(self, normalized_shape):
super(BiasFree_LayerNorm, self).__init__()
if isinstance(normalized_shape, numbers.Integral):
normalized_shape = (normalized_shape,)
normalized_shape = torch.Size(normalized_shape)
assert len(normalized_shape) == 1
self.weight = nn.Parameter(torch.ones(normalized_shape))
self.normalized_shape = normalized_shape
def forward(self, x):
sigma = x.var(-1, keepdim=True, unbiased=False)
return x / torch.sqrt(sigma + 1e-5) * self.weight
class LayerNorm(nn.Module):
def __init__(self, dim, LayerNorm_type):
super(LayerNorm, self).__init__()
if LayerNorm_type == 'BiasFree':
self.body = BiasFree_LayerNorm(dim)
else:
self.body = WithBias_LayerNorm(dim)
def forward(self, x):
h, w = x.shape[-2:]
return to_4d(self.body(to_3d(x)), h, w)
class FSAS(nn.Module):
def __init__(self, dim, bias=False):
super(FSAS, self).__init__()
self.to_hidden = nn.Conv2d(dim, dim * 6, kernel_size=1, bias=bias)
self.to_hidden_dw = nn.Conv2d(dim * 6, dim * 6, kernel_size=3, stride=1, padding=1, groups=dim * 6, bias=bias)
self.project_out = nn.Conv2d(dim * 2, dim, kernel_size=1, bias=bias)
self.norm = LayerNorm(dim * 2, LayerNorm_type='WithBias')
self.patch_size = 8
def forward(self, x):
hidden = self.to_hidden(x)
q, k, v = self.to_hidden_dw(hidden).chunk(3, dim=1)
q_patch = rearrange(q, 'b c (h patch1) (w patch2) -> b c h w patch1 patch2', patch1=self.patch_size,
patch2=self.patch_size)
k_patch = rearrange(k, 'b c (h patch1) (w patch2) -> b c h w patch1 patch2', patch1=self.patch_size,
patch2=self.patch_size)
q_fft = torch.fft.rfft2(q_patch.float())
k_fft = torch.fft.rfft2(k_patch.float())
out = q_fft * k_fft
out = torch.fft.irfft2(out, s=(self.patch_size, self.patch_size))
out = rearrange(out, 'b c h w patch1 patch2 -> b c (h patch1) (w patch2)', patch1=self.patch_size,
patch2=self.patch_size)
out = self.norm(out)
output = v * out
output = self.project_out(output)
return output
def autopad(k, p=None, d=1): # kernel, padding, dilation
"""Pad to 'same' shape outputs."""
if d > 1:
k = d * (k - 1) + 1 if isinstance(k, int) else [d * (x - 1) + 1 for x in k] # actual kernel-size
if p is None:
p = k // 2 if isinstance(k, int) else [x // 2 for x in k] # auto-pad
return p
class Conv(nn.Module):
"""Standard convolution with args(ch_in, ch_out, kernel, stride, padding, groups, dilation, activation)."""
default_act = nn.SiLU() # default activation
def __init__(self, c1, c2, k=1, s=1, p=None, g=1, d=1, act=True):
"""Initialize Conv layer with given arguments including activation."""
super().__init__()
self.conv = nn.Conv2d(c1, c2, k, s, autopad(k, p, d), groups=g, dilation=d, bias=False)
self.bn = nn.BatchNorm2d(c2)
self.act = self.default_act if act is True else act if isinstance(act, nn.Module) else nn.Identity()
def forward(self, x):
"""Apply convolution, batch normalization and activation to input tensor."""
return self.act(self.bn(self.conv(x)))
def forward_fuse(self, x):
"""Perform transposed convolution of 2D data."""
return self.act(self.conv(x))
class HGBlock_FSAS(nn.Module):
"""
HG_Block of PPHGNetV2 with 2 convolutions and LightConv.
https://github.com/PaddlePaddle/PaddleDetection/blob/develop/ppdet/modeling/backbones/hgnet_v2.py
"""
def __init__(self, c1, cm, c2, k=3, n=6, lightconv=False, shortcut=False, act=nn.ReLU()):
"""Initializes a CSP Bottleneck with 1 convolution using specified input and output channels."""
super().__init__()
block = LightConv if lightconv else Conv
self.m = nn.ModuleList(block(c1 if i == 0 else cm, cm, k=k, act=act) for i in range(n))
self.sc = Conv(c1 + n * cm, c2 // 2, 1, 1, act=act) # squeeze conv
self.ec = Conv(c2 // 2, c2, 1, 1, act=act) # excitation conv
self.add = shortcut and c1 == c2
self.cv = FSAS(c2)
def forward(self, x):
"""Forward pass of a PPHGNetV2 backbone layer."""
y = [x]
y.extend(m(y[-1]) for m in self.m)
y = self.cv(self.ec(self.sc(torch.cat(y, 1))))
return y + x if self.add else y
四、创新模块
4.1 改进点⭐
模块改进方法
:基于
FSAS模块
的
HGBlock
(
第五节讲解添加步骤
)。
第二种改进方法是对
RT-DETR
中的
HGBlock模块
进行改进,并将
FSAS
在加入到
HGBlock
模块中。
改进代码如下:
对
HGBlock
模块进行改进,加入
FSAS模块
,并重命名为
HGBlock_FSAS
。
class HGBlock_FSAS(nn.Module):
"""
HG_Block of PPHGNetV2 with 2 convolutions and LightConv.
https://github.com/PaddlePaddle/PaddleDetection/blob/develop/ppdet/modeling/backbones/hgnet_v2.py
"""
def __init__(self, c1, cm, c2, k=3, n=6, lightconv=False, shortcut=False, act=nn.ReLU()):
"""Initializes a CSP Bottleneck with 1 convolution using specified input and output channels."""
super().__init__()
block = LightConv if lightconv else Conv
self.m = nn.ModuleList(block(c1 if i == 0 else cm, cm, k=k, act=act) for i in range(n))
self.sc = Conv(c1 + n * cm, c2 // 2, 1, 1, act=act) # squeeze conv
self.ec = Conv(c2 // 2, c2, 1, 1, act=act) # excitation conv
self.add = shortcut and c1 == c2
self.cv = FSAS(c2)
def forward(self, x):
"""Forward pass of a PPHGNetV2 backbone layer."""
y = [x]
y.extend(m(y[-1]) for m in self.m)
y = self.cv(self.ec(self.sc(torch.cat(y, 1))))
return y + x if self.add else y

注意❗:在
第五小节
中需要声明的模块名称为:
HGBlock_FSAS
。
五、添加步骤
5.1 修改一
① 在
ultralytics/nn/
目录下新建
AddModules
文件夹用于存放模块代码
② 在
AddModules
文件夹下新建
FSAS.py
,将
第三节
中的代码粘贴到此处

5.2 修改二
在
AddModules
文件夹下新建
__init__.py
(已有则不用新建),在文件内导入模块:
from .FSAS import *

5.3 修改三
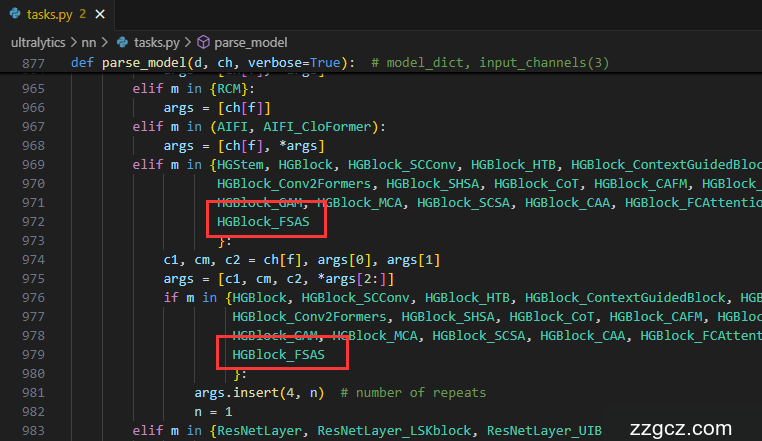
在
ultralytics/nn/modules/tasks.py
文件中,需要在两处位置添加各模块类名称。
首先:导入模块

其次:在
parse_model函数
中注册
HGBlock_FSAS
模块

六、yaml模型文件
6.1 模型改进版本⭐
此处以
ultralytics/cfg/models/rt-detr/rtdetr-l.yaml
为例,在同目录下创建一个用于自己数据集训练的模型文件
rtdetr-l-HGBlock_FSAS.yaml
。
将
rtdetr-l.yaml
中的内容复制到
rtdetr-l-HGBlock_FSAS.yaml
文件下,修改
nc
数量等于自己数据中目标的数量。
📌 模型的修改方法是将
骨干网络
中的
HGBlock模块
替换成
HGBlock_FSAS模块
。
# Ultralytics YOLO 🚀, AGPL-3.0 license
# RT-DETR-l object detection model with P3-P5 outputs. For details see https://docs.ultralytics.com/models/rtdetr
# Parameters
nc: 1 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov8n-cls.yaml' will call yolov8-cls.yaml with scale 'n'
# [depth, width, max_channels]
l: [1.00, 1.00, 1024]
backbone:
# [from, repeats, module, args]
- [-1, 1, HGStem, [32, 48]] # 0-P2/4
- [-1, 6, HGBlock, [48, 128, 3]] # stage 1
- [-1, 1, DWConv, [128, 3, 2, 1, False]] # 2-P3/8
- [-1, 6, HGBlock, [96, 512, 3]] # stage 2
- [-1, 1, DWConv, [512, 3, 2, 1, False]] # 4-P4/16
- [-1, 6, HGBlock_FSAS, [192, 1024, 5, True, False]] # cm, c2, k, light, shortcut
- [-1, 6, HGBlock_FSAS, [192, 1024, 5, True, True]]
- [-1, 6, HGBlock_FSAS, [192, 1024, 5, True, True]] # stage 3
- [-1, 1, DWConv, [1024, 3, 2, 1, False]] # 8-P5/32
- [-1, 6, HGBlock, [384, 2048, 5, True, False]] # stage 4
head:
- [-1, 1, Conv, [256, 1, 1, None, 1, 1, False]] # 10 input_proj.2
- [-1, 1, AIFI, [1024, 8]]
- [-1, 1, Conv, [256, 1, 1]] # 12, Y5, lateral_convs.0
- [-1, 1, nn.Upsample, [None, 2, "nearest"]]
- [7, 1, Conv, [256, 1, 1, None, 1, 1, False]] # 14 input_proj.1
- [[-2, -1], 1, Concat, [1]]
- [-1, 3, RepC3, [256]] # 16, fpn_blocks.0
- [-1, 1, Conv, [256, 1, 1]] # 17, Y4, lateral_convs.1
- [-1, 1, nn.Upsample, [None, 2, "nearest"]]
- [3, 1, Conv, [256, 1, 1, None, 1, 1, False]] # 19 input_proj.0
- [[-2, -1], 1, Concat, [1]] # cat backbone P4
- [-1, 3, RepC3, [256]] # X3 (21), fpn_blocks.1
- [-1, 1, Conv, [256, 3, 2]] # 22, downsample_convs.0
- [[-1, 17], 1, Concat, [1]] # cat Y4
- [-1, 3, RepC3, [256]] # F4 (24), pan_blocks.0
- [-1, 1, Conv, [256, 3, 2]] # 25, downsample_convs.1
- [[-1, 12], 1, Concat, [1]] # cat Y5
- [-1, 3, RepC3, [256]] # F5 (27), pan_blocks.1
- [[21, 24, 27], 1, RTDETRDecoder, [nc]] # Detect(P3, P4, P5)
七、成功运行结果
打印网络模型可以看到
HGBlock_FSAS
已经加入到模型中,并可以进行训练了。
rtdetr-l-HGBlock_FSAS :
rtdetr-l-HGBlock_FSAS summary: 700 layers, 58,152,131 parameters, 58,152,131 gradients, 189.1 GFLOPs
from n params module arguments
0 -1 1 25248 ultralytics.nn.modules.block.HGStem [3, 32, 48]
1 -1 6 155072 ultralytics.nn.modules.block.HGBlock [48, 48, 128, 3, 6]
2 -1 1 1408 ultralytics.nn.modules.conv.DWConv [128, 128, 3, 2, 1, False]
3 -1 6 839296 ultralytics.nn.modules.block.HGBlock [128, 96, 512, 3, 6]
4 -1 1 5632 ultralytics.nn.modules.conv.DWConv [512, 512, 3, 2, 1, False]
5 -1 6 10143360 ultralytics.nn.AddModules.FSAS.HGBlock_FSAS [512, 192, 1024, 5, 6, True, False]
6 -1 6 10503808 ultralytics.nn.AddModules.FSAS.HGBlock_FSAS [1024, 192, 1024, 5, 6, True, True]
7 -1 6 10503808 ultralytics.nn.AddModules.FSAS.HGBlock_FSAS [1024, 192, 1024, 5, 6, True, True]
8 -1 1 11264 ultralytics.nn.modules.conv.DWConv [1024, 1024, 3, 2, 1, False]
9 -1 6 6708480 ultralytics.nn.modules.block.HGBlock [1024, 384, 2048, 5, 6, True, False]
10 -1 1 524800 ultralytics.nn.modules.conv.Conv [2048, 256, 1, 1, None, 1, 1, False]
11 -1 1 789760 ultralytics.nn.modules.transformer.AIFI [256, 1024, 8]
12 -1 1 66048 ultralytics.nn.modules.conv.Conv [256, 256, 1, 1]
13 -1 1 0 torch.nn.modules.upsampling.Upsample [None, 2, 'nearest']
14 7 1 262656 ultralytics.nn.modules.conv.Conv [1024, 256, 1, 1, None, 1, 1, False]
15 [-2, -1] 1 0 ultralytics.nn.modules.conv.Concat [1]
16 -1 3 2232320 ultralytics.nn.modules.block.RepC3 [512, 256, 3]
17 -1 1 66048 ultralytics.nn.modules.conv.Conv [256, 256, 1, 1]
18 -1 1 0 torch.nn.modules.upsampling.Upsample [None, 2, 'nearest']
19 3 1 131584 ultralytics.nn.modules.conv.Conv [512, 256, 1, 1, None, 1, 1, False]
20 [-2, -1] 1 0 ultralytics.nn.modules.conv.Concat [1]
21 -1 3 2232320 ultralytics.nn.modules.block.RepC3 [512, 256, 3]
22 -1 1 590336 ultralytics.nn.modules.conv.Conv [256, 256, 3, 2]
23 [-1, 17] 1 0 ultralytics.nn.modules.conv.Concat [1]
24 -1 3 2232320 ultralytics.nn.modules.block.RepC3 [512, 256, 3]
25 -1 1 590336 ultralytics.nn.modules.conv.Conv [256, 256, 3, 2]
26 [-1, 12] 1 0 ultralytics.nn.modules.conv.Concat [1]
27 -1 3 2232320 ultralytics.nn.modules.block.RepC3 [512, 256, 3]
28 [21, 24, 27] 1 7303907 ultralytics.nn.modules.head.RTDETRDecoder [1, [256, 256, 256]]
rtdetr-l-HGBlock_FSAS summary: 700 layers, 58,152,131 parameters, 58,152,131 gradients, 189.1 GFLOPs