15-使用DQN实现CartPole-v0
使用DQN实现CartPole-v0
推荐使用Double-DQN去解决,即建立两个初始参数相同的全连接网络target_net和policy_net。
CartPole-v0
CartPole-v0是OpenAI gym中的一个经典环境,通过向左(action=0)或向右(action=1)推车能够实现平衡,所以动作空间由两个动作组成。每进行一个step就会给一个+1的reward,如果无法保持平衡那么done等于true,本次episode失败。
理想状态下,每个episode至少能进行200个step,也就是说每个episode的reward总和至少为200,step数目至少为200。

环境建立如下:
env = gym.make('CartPole-v0')
env.seed(1) # 设置env随机种子
n_states = env.observation_space.shape[0] # 获取总的状态数
n_actions = env.action_space.n # 获取总的动作数
强化学习基本接口
rewards = [] # 记录总的rewards
moving_average_rewards = [] # 记录总的经滑动平均处理后的rewards
ep_steps = []
for i_episode in range(1, cfg.max_episodes+1): # cfg.max_episodes为最大训练的episode数
state = env.reset() # reset环境状态
ep_reward = 0
for i_step in range(1, cfg.max_steps+1): # cfg.max_steps为每个episode的补偿
action = agent.select_action(state) # 根据当前环境state选择action
next_state, reward, done, _ = env.step(action) # 更新环境参数
ep_reward += reward
agent.memory.push(state, action, reward, next_state, done) # 将state等这些transition存入memory
state = next_state # 跳转到下一个状态
agent.update() # 每步更新网络
if done:
break
# 更新target network,复制DQN中的所有weights and biases
if i_episode % cfg.target_update == 0: # cfg.target_update为target_net的更新频率
agent.target_net.load_state_dict(agent.policy_net.state_dict())
print('Episode:', i_episode, ' Reward: %i' %
int(ep_reward), 'n_steps:', i_step, 'done: ', done,' Explore: %.2f' % agent.epsilon)
ep_steps.append(i_step)
rewards.append(ep_reward)
# 计算滑动窗口的reward
if i_episode == 1:
moving_average_rewards.append(ep_reward)
else:
moving_average_rewards.append(
0.9*moving_average_rewards[-1]+0.1*ep_reward)
任务要求
训练并绘制reward以及滑动平均后的reward随episode的变化曲线图并记录超参数写成报告,图示如下:



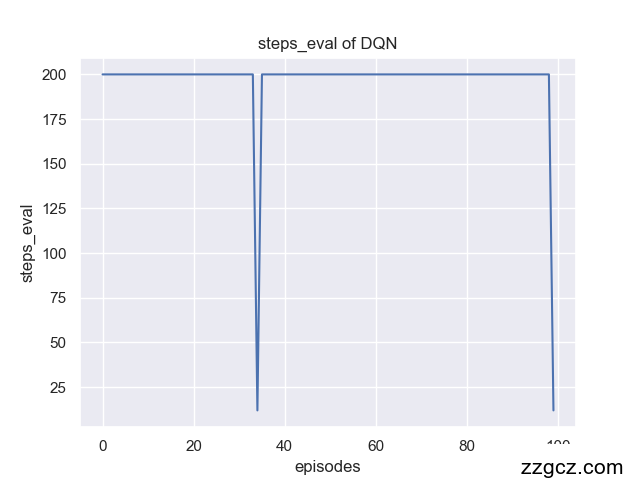
同时也可以绘制测试(eval)模型时的曲线:


也可以tensorboard查看结果,如下:
